SPCŋØÖÆDūÍĘĮŌŧîAūŊÏĩ―yĢŽîAūŊÏĩ―yķžīæÔÚÉîïLëUĢšĩÚŌŧîïLëUĘĮÕ`óūŊïLëUĢĻĩÚŌŧîåeÕ`ĢĐĶÁĢŽĩÚķþîïLëUĘĮÂĐóūŊïLëUĢĻĩÚķþîåeÕ`ĢĐĶÂĄĢ
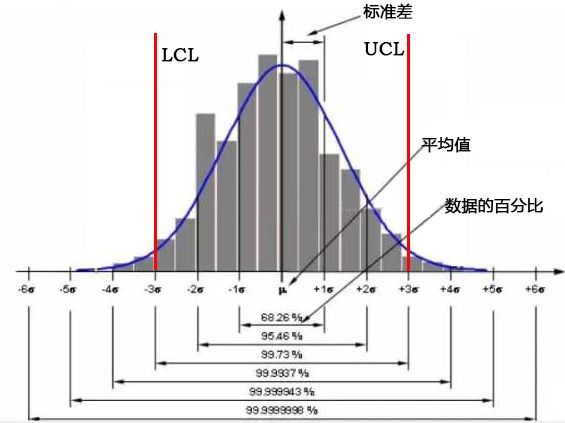
ĶÁïLëUĢšžīĘđß^ģĖršōĖÓÚĘÜŋØ îBĢŽÓÉÓÚÅžČŧÔŌōŌēŋÉÄÜÓÐÄģÐĐücÂäÔÚŋØÖÆÏÞÖŪÍâĢŽČįđûÅÐāéŪģĢĢŽÄĮÃīß@ÅÐāĘĮåeÕ`ĩÄĢŽÆä°lÉúļÅÂĘéĶÁĄĢÔÚ3ĶŌ·―Ę―ÏÂĢŽĶÁ=0.27%ĄĢČįÏÂDËųĘūĢš

ĶÂïLëUĢšČįđûß^ģĖĘĮŪģĢĢŽĩŦŌēþÓÐēŋ·ÖücÎŧÓÚŋØÖÆ―įÏÞČĢŽČįđûģéČĄĩ―ß@ÓĩÄŪaÆ·ĢŽūÍþąŧÅÐāéÕýģĢĢŽÄķø·ļÁËĩÚķþîåeÕ`ĢŽžīÂĐ°lūŊóĄĢ·ļĩÚķþîåeÕ`ĩÄļÅÂĘÓéĶÂĄĢČįÏÂDËųĘūĢš

ČįšÎpÉŲÉîåeÕ`ËųÔėģÉĩÄpʧĢŋÕ{ÕûUCLÅcLCLÖŪégĩÄūāëxŋÉŌÔÔöžÓŧōpÉŲĶÁšÍĶÂĄĢČôīËūāëxÔöžÓtĶÁpÉŲĢŽĶÂÔöīóĢŧ·īÖŪtĶÁĢŽÔöīóĢŽĶÂpÉŲĢŽÕ
ĒŋžÉÏĘöÉDĄĢ
ÅeĀýíÕfĢŽÎŌ°īÕÕĶĖĄĀ3ĶŌĩÄŌtĢŽČįđû°lŽFĩþücÔÚĶĖĄĀ3ĶŌÖŪÍâĢŽÎŌÕJéß@ĩþücĘĮŪģĢĩÄĢŽĩŦÎŌß@ÅÐķĻĘĮåeÕ`ĩÄļÅÂĘĘĮĶÁĢŽžī0.27%ĢŽÉŲÓÚ―yÓWÖÐĩÄ5%ĩÄï@ÖøÐÔËŪÆ―ĄĢ
Ōŧ―âQ·―°ļĘĮĢšļųþĘđÉ·NåeÕ`ÔėģÉĩÄŋpʧŨîÐĄĩÄÔtíī_ķĻUCLÅcLCLķþÕßÖŪégĩÄŨîégļôūāëxĄĢ―ōŨCÃũĢšÐÝđþĖØËųĖáģöĩÄ3ĶŌ·―Ę―Ý^šÃĢŽÔÚēŧÉŲĮérÏÂĢŽ 3ĶŌ·―Ę―ķž―Ó―üŨîégļôūāëxĄĢ ÏÂDÁÐģöĶĖĄĀnĶŌĩÄ1-ĶÁĩÄļÅÂĘĄĢ
ŌōéģĢŌŋØÖÆDĩÄÔOÓËžÏëĘĮÏČī_ķĻ·ļĩÚŌŧîåeÕ`ĩÄļÅÂĘĶÁĢŽÔŲī_ķĻ·ļĩÚķþîåeÕ`ĩÄļÅÂĘĶÂĄĢ
°īÕÕ3ĶŌ·―Ę―ī_ķĻCLĄĒUCLĄĒLCLūÍĩČÓÚī_ķĻÁËĶÁ =0.27%ĢŧÔÚ―yÓÖÐÍĻģĢēÉÓÃĶÁ=1%ĢŽ5%ĢŽ10%ČýžĢŽĩŦÐÝđþĖØéÁËÔöžÓĘđÓÃÕßĩÄÐÅÐÄĢŽ°ŅģĢŌŋØÖÆDĩÄĶÁČĄĩÄĖØeĩÄÐĄĢŽß@ÓĶÂūÍąČÝ^īóĢŽß@ūÍÐčŌŠÔöžÓĩÚķþîÅÐŪĘtĢŽžīąãücÔÚŋØÖÆÏÞČĢŽĩŦŪücÅÅÁÐēŧëSCŌēąíĘūīæÔÚŪģĢŌōËØĄĢ
ß@ūÍĘĮéĘēÃīģĢŌŋØÖÆDĩÄŪģĢÅÐķĻĘtÓÐÉîĢŽžīĢšücģŽģöŋØÖÆÏÞūÍÅÐŪšÍŋØÖÆÏÞČücÅÅÁÐēŧëSCÅÐŪÉîĄĢ